
视觉检测设备

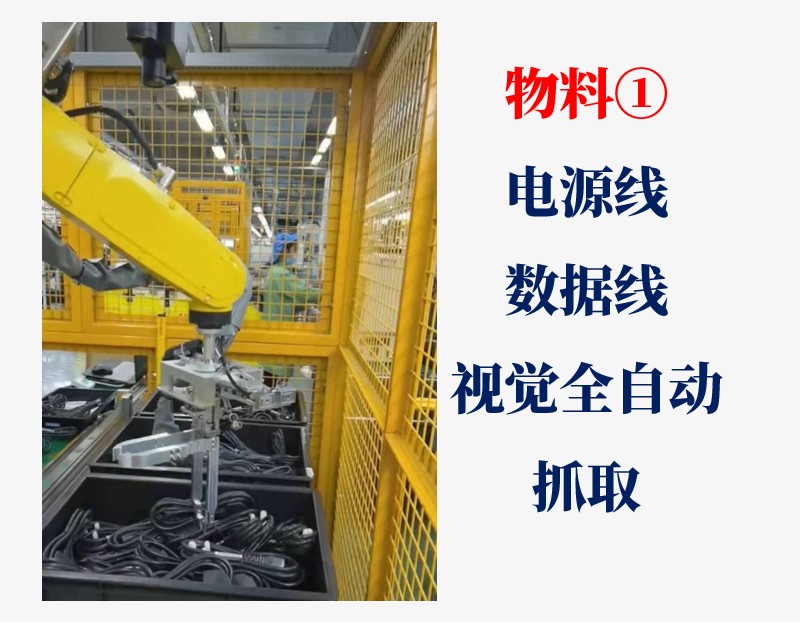
3D 无序抓取设备的工作原理基于先进的机器视觉和机器人技术。首先,视觉系统对工作区域进行扫描,获取目标物体的 3D 图像信息。然后,通过图像处理算法对图像进行分析和处理,识别出目标物体的位置、姿态和形状等特征。接着,控制系统根据视觉系统提供的信息,规划机械臂的运动路径,使机械臂能够准确地抓取目标物体。最后,机械臂将抓取的物体放置到指定位置,完成抓取任务。
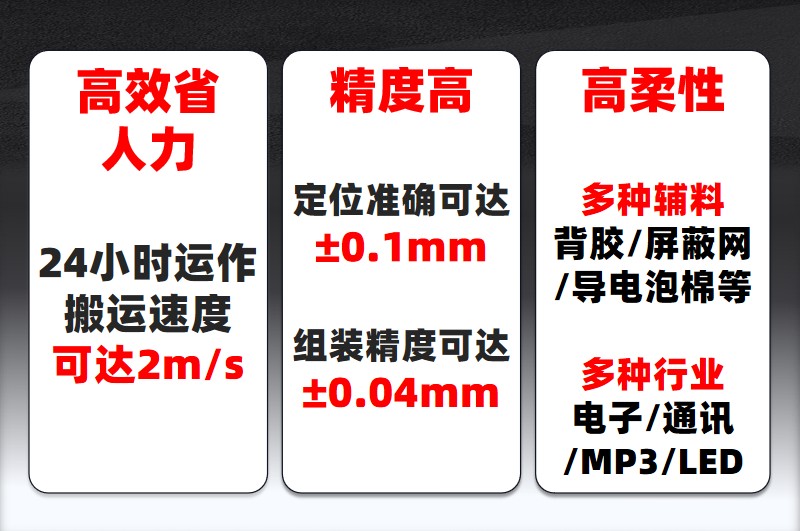
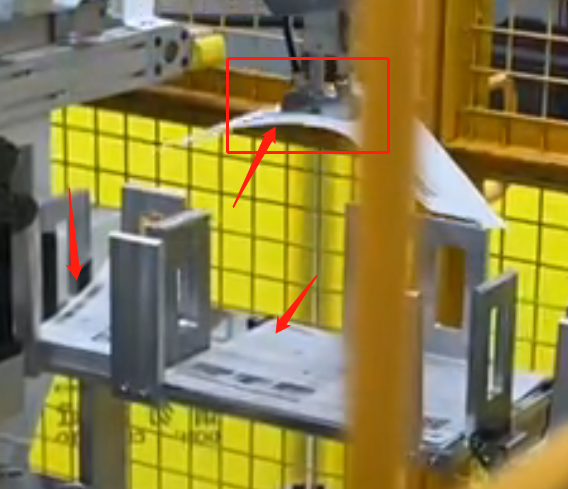
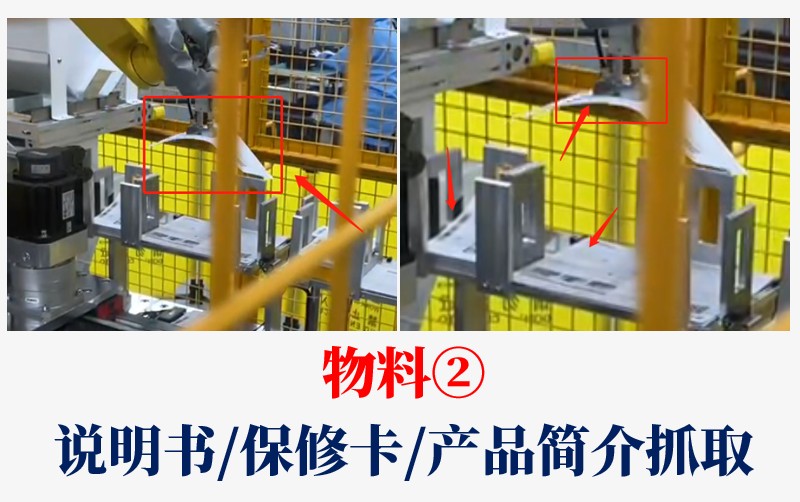
1、自动根据不同产品机型,顺利在5种说明书和3种电源线当中抓配对应的包装配件。 2、其中电源线为乱序/无序抓取。
抓配速度:90秒/一组
抓取成功率:≥98%

全国服务热线:13532290101
国内服务热线:16620389818
邮箱:guozhihong@boruims.com
地址:广州市黄埔区连云路8号13栋101房(部位:416房)






13532290101
国内服务热线:16620389818
邮箱:guozhihong@boruims.com
地址:广州市黄埔区连云路8号13栋101房(部位:416房)
